







С развитием технологий уровень автоматизации технологических процессов растёт во всех отраслях промышленности. При этом центральным элементом любой автоматической системы управления (АСУ) является программируемый логический контроллер (ПЛК).
ПЛК — это устройство для сбора, преобразования, обработки, хранения информации и отправки команд управления в соответствии с заданной логикой работы (программы).
В магазине Би Энд Би Инжиниринг представлены контроллеры и системы управления для пневмоприводов, сервопневматических систем позиционирования и электромеханических систем. Наши специалисты подберут подходящий контроллер, окажут услуги по его программированию и настройке, а купить контроллер с необходимой комплектацией модулей можно за наличный расчёт или по безналичному расчёту для юридических лиц. Доставка осуществляется по всему Казахстану со склада в Алматы.
Применение и типы промышленных контроллеров
Контроллеры применяются по всех отраслях промышленности, где требуется хотя бы минимальный уровень автоматизации: металлургия, металлообработка, автомобилестроение, химическая промышленность и др.
Программируемые контроллеры пришли на замену схемам на жёсткой релейной логике. В отличие от релейных схем, в ПЛК все функции реализованы программно, что позволяет при необходимости менять логику и функциональность схемы без изменения аппаратной части, загрузив в контроллер нужную программу.
В зависимости от сферы применения контроллеры подразделяют на типы:
- общепромышленные (универсальные)
- узкоспециализированные
- для управления позиционированием и перемещением пневматических и электромеханических приводов
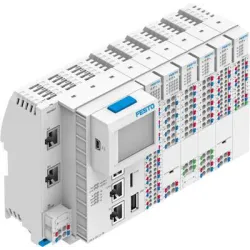
Универсальные контроллеры, как правило, имеют модульную конструкцию и позволяют управлять одновременно самыми разными системами предприятия: начиная от технологических процессов и заканчивая системами безопасности. В зависимости от подключаемого к ним оборудования они комплектуются необходимым набором модулей входов и выходов (как дискретных, так и аналоговых), а также коммуникационными модулями.
Узкоспециализированные контроллеры предназначены для управления конкретным типом оборудования и часто выпускаются производителями этого оборудования. Обычно они имеют моноблочную конструкцию и узкий набор входов/выходов и функционала, достаточного для решения лишь определённых задач.
Для управления системами пневмоавтоматики могут использоваться как универсальные ПЛК, так и специальные контроллеры в зависимости от сложности задачи.
В большинстве пневматических систем пневмоприводы (цилиндры, поворотные приводы запорной арматуры) работают дискретно, перемещаясь из одного конечного положения в другое. В этом случае можно использовать любой универсальный контроллер с дискретными выходами, который подаёт сигналы на катушки распределителей, тем самым меняя положение пневмоприводов. Обратную связь такой контроллер получает от дискретных датчиков положения, установленных в конечных положениях приводов.
Более продвинутым решением является использование специального контроллера, встроенного в пневмоостров (блок клапанов). Такой контроллер по внутренней шине активирует катушки распределителей и позволяет добиться экономии на кабелях и электромонтажных работах.
В редких случаях пневматическое оборудование используется в системах позиционирования, т.е. когда пневмоприводам необходимо занимать заранее известные промежуточные положения или, что ещё сложнее, реагировать на параметры процесса, подстраиваясь в режиме реального времени (следящий привод).
Такие системы называются сервопневматическими и для них используются специальные контроллеры, комплектующиеся программным обеспечением для задания положений и скорости приводов.
Для высокоточных и динамичных систем позиционирования обычно используются электромеханические приводы. В составе электромеханической системы помимо самих приводов и их электродвигателей обязательно присутствуют контроллеры для электродвигателей (драйверы). В них закладывается программа, определяющая профиль движения привода (координаты, скорости, ускорения), а для определения текущих параметров предусмотрены интерфейсы для подключения датчиков обратной связи (энкодеров).
Структуры систем управления
- Централизованная. К центральному процессорному устройству (ЦПУ) последовательно на рейке внутри шкафа управления подключаются модули вводов и выводов, коммуникационные модули. Исполнительные устройства и датчики подключаются отдельными проводами к модулям ввода/вывода.
- Распределённая. К ведущему контроллеру (master) подключаются ведомые устройства (slave), разнесённые по зданию/цеху/заводу. Связь между ведущим и ведомыми устройствами выполняется по полевой шине (fieldbus). Такая топология сети позволяет добиться экономии на габарите центрального шкафа управления, на кабелях и реализовать повышенную модульность и гибкость системы.
Как выбрать контроллер
Выбор контроллера для системы управления — это комплексная задача, для решения которой по сути необходимо спроектировать всю систему целиком, определив тем самым перечень всех подключаемых устройств, интерфейсы связи между всеми элементами, количество и типы входных/выходных сигналов, структуру системы управления, выполняемые задачи и многое другое.
В компании Би Энд Би Инжиниринг работают инженеры высокого уровня, которые самостоятельно могут спроектировать пневматическую или электрическую схему управления для решения вашей задачи, подобрав контроллеры и всё необходимое дополнительное оборудование.
Обращайтесь к профессионалам, вы будете приятно удивлены качеством оказанного сервиса.
